先備知識與注意事項
如果非要在這個章節加上一份先備知識,我會說是Google Map。
目錄
最短路徑問題(Shortest Path)
為了解決較為廣義的情境,接下來討論的最短路徑問題將考慮的是一個weighted directed graph,以weight總和表示path之成本,並以具有方向性之edge表示兩個vertex之間的關係。
- undirected graph的問題能夠以directed graph的模型解決,反之則無法。
- 不具weight的edge也能夠以weighted edge模擬(將全部weight設為相同數值即可),反之則無法。
- 可以視為只能處理unweighted graph之BFS/DFS的擴充包。
定義名詞:
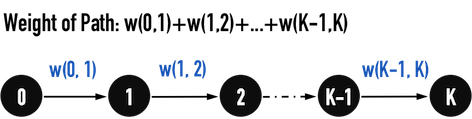
- path之weight:若有一條\(Path:0-1-2-...-K\),定義其weight為所有edge之weight總和,\(w(path)=\sum_{i=1}^{K}w(i-1,i)\),如圖一。
-
最短路徑之成本\(w(path)=\delta(X,Y)\):在Graph上,所有從vertex(X)出發抵達vertex(Y)的path中,具有最小weight之path,稱為最短路徑,其weight滿足:
- \(\delta(X,Y)=\min\){\(w(path)\), for all path from X to Y}。
(可能有多條path之weight皆為極小值,那麼這些path都是最短路徑。)
- \(\delta(X,Y)=\min\){\(w(path)\), for all path from X to Y}。
-
若\(\delta(X,Y)=\infty\),則表示無法從vertex(X)走到vertex(Y)。
圖一。
根據出發的vertex(稱為source)與終點vertex(稱為destination)之數量選擇,可以將最短路徑問題分成四類:
- Single-Pair Shortest Path:從單一vertex,抵達某個特定vertex之最短路徑,此為第二種問題的子問題;
- Single-Source Shortest Path:從單一vertex,抵達Graph中其餘所有vertex之最短路徑;
- Single-Destination Shortest Path:從Graph中的每一個vertex抵達某個特定vertex之最短路徑:
- 此為第二種問題之變形,只要把edge的方向相反,也就是在GT上,執行第二種問題之演算法即可。
- All-Pairs Shortest Path:Graph中的所有vertex抵達其餘所有vertex之最短路徑。
- 若把每一個vertex都當作起點,即可利用第二種問題之方法解決。
- 不過之後將介紹的Floyd-Warshall Algorithm有更好的答案。
綜合以上,先學第二種問題的演算法:以單一vertex為起點,抵達Graph中的其餘所有vertex之最短路徑,再學第四種問題的Floyd-Warshall Algorithm(以及其他高效率的演算法),就是最明智的選擇。(推銷成功)
先來看個簡單的Single-Source Shortest Path範例:
圖二(a)。
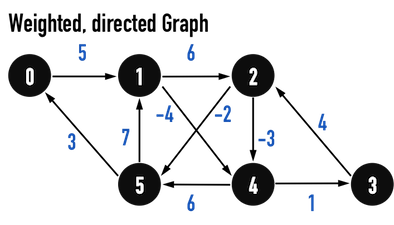
如圖二(a),考慮一個weighted directed graph,若以vertex(0)為起點,要找到從vertex(0)抵達Graph中其餘vertex的最短路徑,結果便如圖二(b)。
- 考慮從vertex(0)走到vertex(2):path\(:0-1-2\)的edge數最少,但是weight總和是\(11\),而edge數較多的\(Path:0-1-4-3-2\)的weight總和只有\(6\),才是從vertex(0)走到vertex(2)的最短路徑。
- 原因在於weight有負值(negative value),所以edge越多的path,weight總和不見得越大(經過某些路徑使得整體成本降低)。
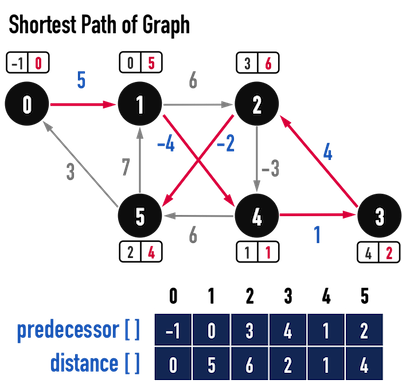
圖二(b):path上之edge越少,不見得weight總和越小。
如圖二(b)所示,在處理最短路徑問題時,最基本需要用到兩個資料項目:
distance[]:記錄從起點vertex,經過具有weight之edge,走到其餘vertex之「距離」,也就是該條path之weight。若有一條\(Path:0-1-2\),則path之weight總和即記錄在distance[2]。predecessor[]:除了距離之外,還希望能夠回溯路徑,因此需要記錄vertex之predecessor,並以此得到Predecessor Subgraph。
由於最短路徑一定不包含cycle,Predecessor Subgraph會是一棵Shortest-Path Tree。
- 起點vertex即為root;
- 從root到其餘vertex的path必定是唯一的最短路徑。
(若Graph上出現\(\delta(X,Y)=\infty\)的情況,Predecessor Subgraph會是Shortest-Path Forest。)
限制
為什麼最短路徑一定不包含cycle?
由於weight只要求是實數(real number),weight可正可負,因此Graph中可能出現weight總和為正的cycle與weight總和為負的cycle。
考慮圖三(a),cycle\(:1-2-3\)之weight為\(10\),若path經過此cycle,weight之總和必定會增加,此path不會是最短路徑。考慮從vertex(0)走到vertex(4):
- \(Path:0-1-2-3-4\)之weight為\(10\);
- 經過一次cycle,\(Path:0-1-2-3-1-2-3-4\)之weight為\(20\)。

圖三(a)。
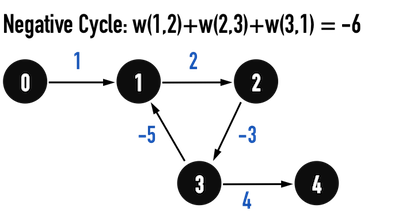
考慮圖三(b),cycle\(:1-2-3\)之weight為\(-6\),表示path經過此cycle,weight之總和就會減少,而且經過越多次,weight總和越少,所以永遠不會有最短路徑,\(\delta(X,Y)=-\infty\)。考慮從vertex(0)走到vertex(4):
- \(Path:0-1-2-3-4\)之weight為\(4\);
- 經過一次cycle,\(Path:0-1-2-3-1-2-3-4\)之weight為\(-2\);
- 經過兩次cycle,\(Path:0-1-2-3-1-2-3-1-2-3-4\)之weight為\(-8\);
圖三(b)。
因此,在考慮最短路徑問題時,問題之Graph可以有總和為正值的cycle,但是不能有總和為負值的cycle。
而演算法所挑選出來的最短路徑之Predecessor Subgraph,一定不包含cycle。
特徵
最短路徑除了不會有cycle外,還有兩點特徵值得一提。
特徵一:因為最短路徑不存在cycle,在共有\(V\)個vertex之Graph中,從vertex(X)走到vertex(Y)的最短路徑,至多只會包含\(|V|-1\)條edge。
- 如圖二(b),從vertex(0)走到vertex(5)的paht上,共有\(5\)條edge。
此種情形發生在Shortest-Path Tree退化成Linked list的時候。
特徵二:。若在Graph上,存在一條從vertex(0)走到vertex(K)的最短路徑,\(P:v_0-v_1-v_2-...-v_K\),並定義所有path上的vertex所形成的subpath為\(P_{ij}:v_i-v_{i+1}-...-v_j\),其中\(1\leq i\leq j\leq K\),那麼每一條subpath都會是最短路徑。
白話文:最短路徑必定是由較小段的最短路徑(subpath)所連結起來的。換句話說,由較小段的最短路徑(subpath)接起來的路徑必定仍然是最短路徑。
圖二(b)中,從vertex(0)走到vertex(5)之最短路徑為:\(P:v_0-v_1-v_4-v_3-v_2-v_5\),那麼其中的任何一條path,都是兩個vertex之間的最短距離:
- 從vertex(1)走到vertex(2)之最短路徑:\(P:v_1-v_4-v_3-v_2\),weight總和為\(1\)。
- 從vertex(4)走到vertex(5)之最短路徑:\(P:v_4-v_3-v_2-v_5\),weight總和為\(3\)。
圖二(b)。
以上將「能夠考慮最短路徑問題」的Graph形式,以及「最短路徑之Predecessor Subgraph」的特徵介紹完畢。
接著要介紹尋找最短路徑之演算法核心概念:Relaxation。
觀念:Relaxation
見圖四(a),現從vertex(S)作為起點,欲尋找抵達vertex(X)與vertex(Y)之最短路徑。
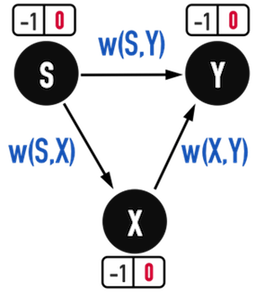
圖四(a)。
其中,vertex(X)之最短路徑只有一種可能,\(\delta(S,X)=w(S,X)\)。
而vertex(Y)可以從vertex(S)或者vertex(X)抵達,因此最短路徑\(\delta(S,Y)\)有兩種可能:
- \(\delta(S,Y)=w(S,Y)\):vertex(Y)經由vertex(S)直接抵達。
- \(\delta(S,Y)=w(S,X)+w(X,Y)\):vertex(S)先經過vertex(X),再到vertex(Y)。
這兩條path中,weight最小的path即是最短路徑。
找到最短路徑的方法很直觀,只要比較這兩條路徑的weight,挑weight小的path即可。
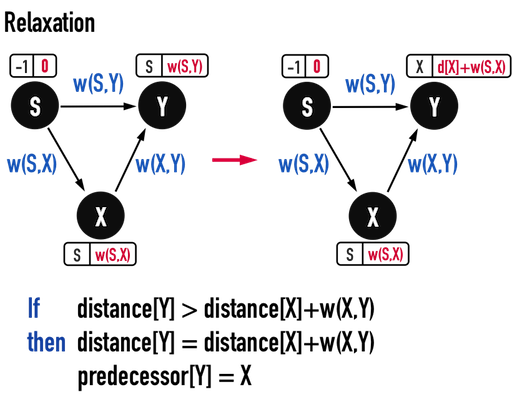
圖四(b)。
以圖四(b)為例,首先從vertex(S)出發,發現其與vertex(X)、vertex(Y)皆有edge相連,便更新兩個vertex的distance為兩條相連edge之weight:
distance[Y]=w(S,Y);distance[X]=w(S,X)。
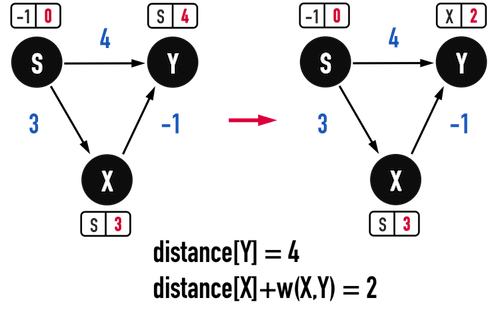
接著考慮經過vertex(X)再到vertex(Y)之path有沒有可能成本較低,便比較distance[Y]與distance[X]+w(X,Y):
- 若
distance[Y]\(>\)distance[X]+w(X,Y),則表示\(P:S-X-Y\)之成本小於\(P:S-Y\),因此從vertex(S)經過vertex(X)再到vertex(Y)才是最短路徑,便更新distance[Y]=distance[X]+w(X,Y);predecessor[Y]=X。
- 反之,若
distance[Y]\(<\)distance[X]+w(X,Y),表示\(P:S-Y\)之成本小於\(P:S-X-Y\),則不需要更新兩個資料項目,目前的路徑已經是最短路徑。
以上的「比較distance後決定是否更新distance(與predecessor)」步驟,就是Relaxation。
Relax()之範例程式碼如下:
// C++ code
// Relax() as a member function of class Graph_SP
void Graph_SP::Relax(int from, int to, int weight){
if (distance[to] > distance[from] + weight) {
distance[to] = distance[from] + weight;
predecessor[to] = from;
}
}
根據Relaxation可以衍生出幾個性質:
Triangle inequality
經過Relaxation,並得到最短路徑後,任意兩個在Graph上之vertex(X)與vertex(Y),若存在edge(X,Y)從vertex(X)指向vertex(Y),必定滿足以下關係(假設vertex(S)為起點):
- \(\delta(S,Y)\leq \delta(S,X)+w(X,Y)\)。
Upper-Bound property
一旦從vertex(S)抵達vertex(X)之path已經更新至最短路徑\(\delta(S,X)\),那麼distance[X]將不再更新,保持distance[X]\(=\delta(S,X)\)至演算法程序結束。
- 觀察
Relax()的if條件式,若新的path之weight比原有的path之weight還大,就不更新distance與predecessor。
Convergence property
假定Graph上存在從vertex(X)指向vertex(Y)之edge(X,Y),並且從起點vertex走到vertex(Y)之最短路徑包含這條edge。
若在對edge(X,Y)進行Relax()之前,從vertex(S)到達vertex(X)的path就已經滿足最短路徑,distance[X]\(=\delta(S,X)\),那麼在對edge(X,Y)進行Relax()後,必定得到從vertex(S)走到vertex(Y)之最短路徑,並更新distance[Y]\(=\delta(S,Y)\),而且至此之後,distance[Y]將不會再被更新。
如圖五(a),\(Path=S-X-Y\)是從vertex(S)走到vertex(Y)的最短路徑,並且在對edge(X,Y)進行Relax()之前,從vertex(S)走到vertex(X)之path已經是最短路徑,distance[X]\(=\delta(S,X)\),那麼,此時對edge(X,Y)進行Relax(),必定能得到從vertex(S)走到vertex(Y)之最短路徑,distance[Y]\(=\delta(S,Y)\)。
圖五(a)。
但是若從vertex(S)走到vertex(Y)之最短路徑不包含edge(X,Y),那麼即使在對edge(X,Y)做Relax()之前,distance[X]已經等於\(\delta(S,X)\),distance[Y]仍然不更新。
這表示,distance[Y]已經等於\(\delta(S,Y)\),如圖五(b)。或者,從vertex(S)走到vertex(Y)之最短路徑會從其他vertex走到vertex(Y)。

圖五(b)。
Path-relaxation property
考慮一條從vertex(0)到vertex(K)之路徑\(P:v_0-v_1-...-v_K\),如果在對path之edge進行Relax()的順序中,曾經出現edge(v0,v1)、edge(v1,v2)、...、edge(vK-1,vK)的順序,那麼這條path一定是最短路徑,滿足distance[K]\(=\delta(v_0,v_K)\)。
- 在對edge(v1,v2)進行
Relax()之前,只要已經對edge(v0,v1)進行過Relax(),那麼,不管還有對其餘哪一條edge進行Relax(),distance[2]必定會等於\(\delta(0,2)\),因為Convergence property。
例如,現有一條從vertex(0)走到vertex(3)之最短路徑為\(Path:0-1-2-3\),根據Convergence property,只要在對edge(1,2)進行Relax()之前,已經對edge(0,1)進行Relax(),如此便保證\(Path:0-1-2\)一定是最短路徑,此時再對edge(2,3)進行Relax(),便能找到\(Path:0-1-2-3\)。
換言之,只要確保Relax()的過程曾經出現「edge(0,1)->edge(1,2)->edge(2,3)」的順序,不需理會中間是否有其他edge進行Relax(),即使有也不影響最後結果。
- 例如,
Relax()順序:「edge(2,3)->edge(0,1)->edge(2,3)->edge(1,2)->edge(2,3)」仍可以得到最短路徑,distance[3]\(=\delta(0,3)\)。
精彩預告
接下來三篇文章,將介紹處理Single-Source Shortest Path的三種演算法,各別的適用情境與時間複雜度如下:
(注意:一律不允許negative cycle出現)
- Bellmem-Ford Algorithm:
- 只要Graph中沒有negative cycle,即使有positive cycle、edge有negative weight,皆可使用。
- 時間複雜度:\(O(VE)\)。
- Shortest Path on DAG:
- 只要Graph中沒有cycle,即使edge有negative weight,亦可使用。
- 時間複雜度:\(O(V+E)\)。
- Dijkstra's Algorithm:
- 只要Graph中的edge沒有negative weight,即使有cycle,亦可使用。
- 時間複雜度,根據實現Min-Priority Queue之資料結構將有所不同:
- 若使用普通矩陣(array),需要\(O(E+V^2)\);
- 若使用Binary Heap,需要\(O((E+V)\log V)\);
- 若使用Fibonacci Heap,只需要\(O(E+V\log V)\)。
將以上描述做成表格,見表一與表二:
| 有positive cycle | 沒有positive cycle | |
|---|---|---|
| 有negative weight | Bellman-Ford | on DAG |
| 沒有negative weight | Dijkstra | All three |
表一:三種演算法之使用情境比較
| Bellman-Ford | on DAG | Dijkstra(worst) | Dijkstra(best) |
|---|---|---|---|
| \(O(VE)\) | \(O(V+E)\) | \(O(E+V^2)\) | \(O(E+V\log V)\) |
表二:三種演算法之時間複雜度比較
參考資料:
- Introduction to Algorithms, Ch24
- Fundamentals of Data Structures in C++, Ch6
- Wikipedia:Shortest path problem
- 大話西遊之仙履奇緣
Shortest Path系列文章
Shortest Path:Intro(簡介)
Single-Source Shortest Path:Bellman-Ford Algorithm
Single-Source Shortest Path:on DAG(directed acyclic graph)
Single-Source Shortest Path:Dijkstra's Algorithm
All-Pairs Shortest Path:Floyd-Warshall Algorithm
回到目錄: