先備知識與注意事項
考慮如下情境:
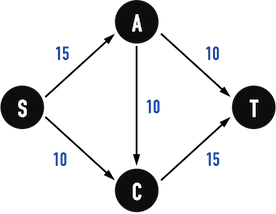
在某個污水處理廠的某一道程序裡,有一個「進水孔」,和一個「排水孔」,中間由許多「孔徑不一」的水管連接起來,因為水管的「孔徑大小」會影響到「每單位時間的流量」,因此要解決的問題,就是找到每單位時間可以排放「最大流量(flow)」的「排水方法」。
圖一。
以圖一為例,進水孔為vertex(S),排水孔為vertex(T),中間要經過污水處理站vertex(A)與vertex(C)。
edge代表水管,edge之weight(以下將稱為capacity)表示水管的「孔徑」。
考慮兩種「排水方法」的flow:
- 第一種「分配水流」的方法,每單位時間總流量為\(20\):
- 在\(Path:S-A-T\)上每單位時間流了\(5\)單位的水;
- 在\(Path:S-A-C-T\)上每單位時間流了\(10\)單位的水(問題出在這,占去了edge(C,T)的容量);
- 在\(Path:S-C-T\)上,因為edge(C,T)上只剩下「\(5\)單位的容量」,因此每單位時間流了\(5\)單位的水;
- 第二種「分配水流」的方法,每單位時間總流量為\(25\):
- 在\(Path:S-A-T\)上每單位時間流了\(10\)單位的水;
- 在\(Path:S-A-C-T\)上每單位時間流了\(5\)單位的水;
- 在\(Path:S-C-T\)上,因為edge(C,T)上剛好還有「\(10\)單位的容量」,因此每單位時間流了\(10\)單位的水;
從以上兩種「排水方式」可以看得出來,解決問題的精神,就是如何有效利用水管的「孔徑容量」,讓最多的水可以從「進水孔」流到「排水孔」。
這就是在Flow Networks上找到Maximum Flow(最大流量)的問題。
以下將介紹Ford-Fulkerson Algorithm(若使用BFS搜尋路徑,又稱為Edmonds-Karp Algorithm)來回應此問題。
目錄
Flow Networks基本性質
Flow Networks是一個weighted,directed graph,其edge(X,Y)具有非負的capacity,\(c(X,Y)\geq 0\),如圖二(a)。
(此處以capacity取代weight,capacity就是「水管孔徑」。)
- 若不存在edge(X,Y),則定義\(c(X,Y)=0\)。
- 特別區分兩個vertex:
- source:表示Flow Networks的「流量源頭」,以s表示;
- sink:表示Flow Networks的「流量終點」,也稱為termination,以t表示。
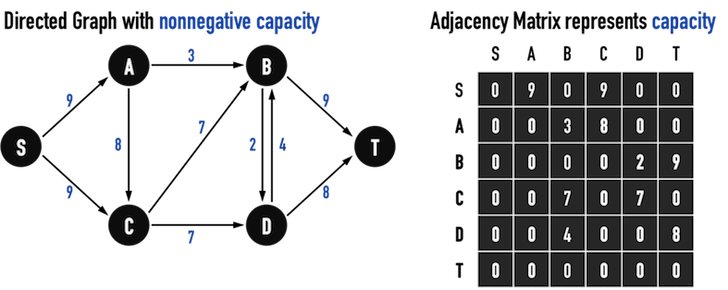
圖二(a)。
而水管裡的「水流」,flow,必須滿足以下條件,見圖二(b):
- Capacity constraint:從vertex(X)流向vertex(Y)的flow,不能比edge(X,Y)的capacity還大,\(f(X,Y)\leq c(X,Y)\)。
- 若每單位時間內,水管孔徑只能容納\(5\)單位,那flow最多就是\(5\)單位。
- 以圖二(b)為例,在\(Path:S-A-C-D-T\)上的edge之capacity皆大於\(6\),因此在此路徑上流入\(6\)單位的flow是可行的。
- Skew symmetry:若定義「從vertex(X)指向vertex(Y)」之edge(X,Y)上,有\(5\)單位的flow,\(f(X,Y)=5\),這就等價於,從vertex(Y)到vertex(X)之edge(Y,X)上,有\(-5\)單位的flow,\(f(Y,X)=-5\)。
- 與「電子流(負電荷)」與「電流(正電荷)」之概念雷同,從「左到右的電流」與「從右到左的電子流」具有等價的物理意義。
- Flow conservation:對Graph中除了source與sink以外的vertex(X)而言,所有「流進flow」之總和要等於所有「流出flow」的總和。
- 也就是水流不會無故增加或無故減少,可視為一種能量守恆。
- 以圖二(b)為例,流入vertex(A)的flow為\(6\),流出vertex(A)的flow也是\(6\),對vertex(C)、vertex(D)也是。
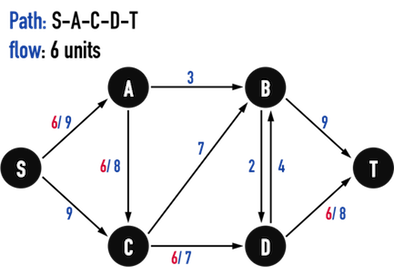
圖二(b)。
Ford-Fulkerson Algorithm
Ford-Fulkerson Algorithm需要兩個輔助工具:
- Residual Networks(剩餘網路)
- Augmenting Paths(增廣路徑)
Residual Networks(剩餘網路)
Residual Networks的概念為,記錄Graph上之edge還有多少「剩餘的容量」可以讓flow流過。
以圖三(a)為例,若在\(Path:S-A-C-D-T\)上的所有edge都有\(6\)單位的flow流過,那麼這些edge(edge(S,A)、edge(A,C)、edge(C,D)、edge(D,T))的可用「剩餘capacity」,都應該要「減\(6\)」,例如,edge(S,A)只能「再容納\(9-6=3\)單位」的flow,edge(C,D)只能「再容納\(7-6=1\)單位」的flow。
這些「剩餘capacity」就稱為residual capacity,以\(c_f\)表示。
若edge(X,Y)上有flow流過,\(f(X,Y)\),便將edge(X,Y)上的residual capacity定義為:
- \(c_f(X,Y)=c(X,Y)-f(X,Y)\)
- \(c(X,Y)\)為原來水管孔徑大小;
- \(f(X,Y)\)表示目前水管已經有多少流量;
- \(c_f(X,Y)\)表示水管還能再容納多少流量。
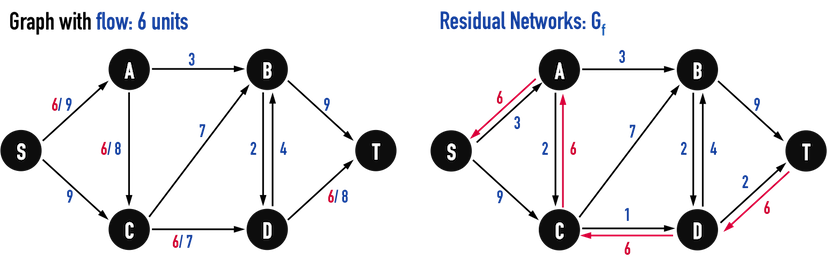
圖三(a)。
Residual Networks也是一個directed graph,其中:
- vertex集合與原directed graph完全相同;
- edge之capacity以residual capacity取代,見圖三(a)右。
最關鍵的是,若「從vertex(A)指向vertex(C)」之edge(A,C)上,有\(6\)單位的flow流過,\(f(A,C)=6\),那麼在其Residual Networks上,會因應產生出一條「從vertex(C)指向vertex(A)」的edge(C,A),並具有\(6\)單位的residual capacity,\(c_f(C,A)=6\)。
- 因為Skew symmetry,\(f(C,A)=-f(A,C)\);
- 再根據定義,\(c_f(C,A)=c(C,A)-f(C,A)=c(C,A)+f(A,C)=0+6=6\),
其物理意義呢?可以用「如果想要重新配置水流方向」來理解。
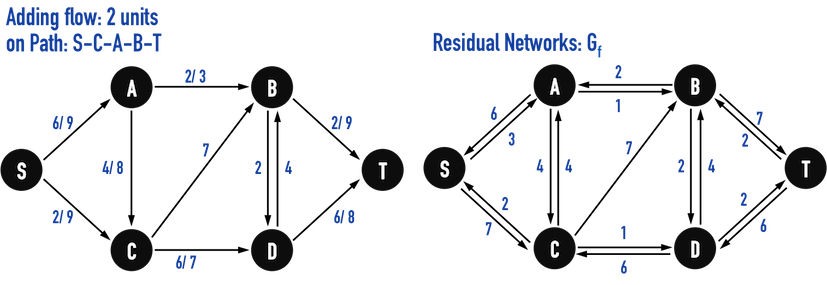
舉例來說,如果現在想經過\(Path:S-C-A-B-T\)流過\(2\)單位的flow,若觀察最一開始「還沒有flow經過」的directed graph(圖二(a)),其實並不存在從vertex(C)指向vertex(A)的edge(C,A),因此\(c(C,A)=0\),但是因為在圖三(a)已經有\(6\)單位的flow從vertex(A)流向vertex(C),使得現在可以從edge(A,C)上把\(2\)單位的flow「收回」,轉而分配到edge(A,B)上,而edge(A,C)上,就剩下\(4\)單位的flow,最後的結果如圖三(b)左所示。
在新增一條「增加flow的Path」後,Residual Networks更新如圖三(b)右。
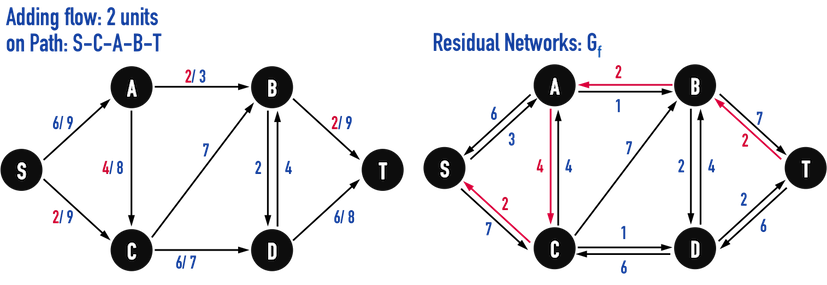
圖三(b)。
經過圖三(a)以及圖三(b)之後,流入sink(或稱termination)的flow累加到\(8\)單位。
Augmenting Paths(增廣路徑)
在Residual Networks裡,所有能夠「從source走到termination」的路徑,也就是所有能夠「增加flow的path」,就稱為Augmenting Paths。
圖四(a)。
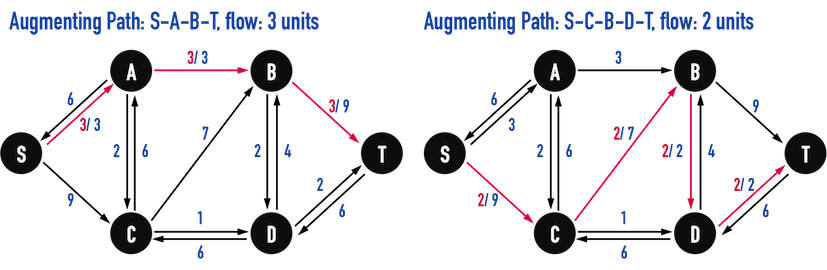
若以圖四(a)的Residual Networks為例,見圖四(b),Augmenting Paths有許多可能,例如:
- \(Path:S-A-B-T\),\(3\)單位的flow。
- 因為在路徑上,所有edge中最小的capacity為\(c(A,B)=3\),因此,flow可以容許從\(1\)單位到\(3\)單位。
- \(Path:S-C-B-D-T\),\(2\)單位的flow。
- 同理,因為在路徑上,所有edge中最小的capacity為\(c(B,D)=c(D,T)=2\),因此,flow可以容許\(1\)單位或\(2\)單位。
- 以及其他。
圖四(b)。
綜合以上可以確定,以圖四(c)為例:
- 若要看當前流入termination的「總流量」,要在圖四(c)左,edge上標示「flow/capacity」的Graph上找。
- 如圖四(c),流入vertex(T)的總flow為\(8\)單位。
- 若要找「還能夠增加多少流量」,也就是找Augmenting Paths,需要在Residual Networks上找,如圖四(c)右。
- 若在\(Path:S-A-B-T\)、\(Path:S-A-C-D-T\)、\(Path:S-C-B-T\)流入「不超過該路徑上最低residual capacity」之flow,都是圖四(c)上的Augmenting Paths。
圖四(c)。
演算法概念
Ford-Fulkerson Algorithm(若使用BFS搜尋路徑,又稱為Edmonds-Karp Algorithm的方法如下:
- 在Residual Networks上尋找Augmenting Paths。
- 若以
BFS()尋找,便能確保每次找到的Augmenting Paths一定經過「最少的edge」。 - 找到Augmenting Paths上的「最小residual capacity」加入總flow。
- 再以「最小residual capacity」更新Residual Networks上的edge之residual capacity。
- 若以
- 重複上述步驟,直到再也沒有Augmenting Paths為止。
便能找到Maximum Flow。
以圖二(a)之Flow Networks作為範例,尋找Maximum Flow之步驟如下:
- 先以「flow為零」對residual networks進行初始化,如圖五(a)。
觀察後發現,Gf就是Adjacency Matrix。
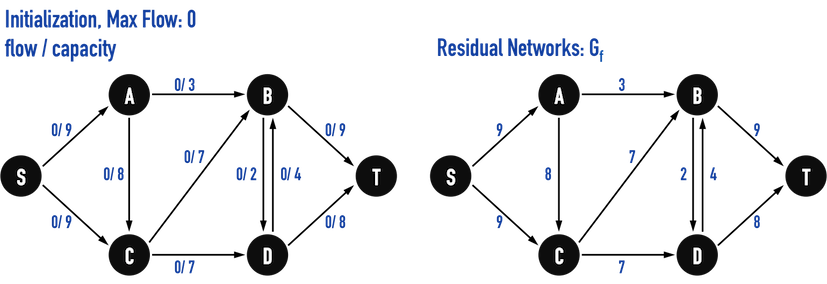
圖五(a)。
- 在Gf上,以
BFS()找到能夠從vertex(S)走到vertex(T),且「egde數最少」的路徑:\(Path:S-A-B-T\),見圖五(b)。- 根據「Graph上建立vertex的順序」,
BFS()有可能找到都是\(3\)條edge的\(Path:S-A-B-T\)或是\(Path:S-C-D-T\)。這裡以前者為例。
- 根據「Graph上建立vertex的順序」,
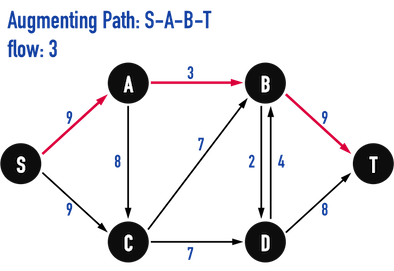
圖五(b)。
-
觀察\(Path:S-A-B-T\)上之edge,發現edge(A,B)具有「最小residual capacity」,\(c_f(A,B)=3\),便更新「總flow新增\(3\)」。
-
Gf上,更新edge之residual capacity,見圖五(c):
- \(c_f(S,A)=c(S,A)-f(S,A)=9-3=6\)
- \(c_f(A,S)=c(A,S)-f(A,S)=0+3=3\)
- \(c_f(A,B)=c(A,B)-f(A,B)=3-3=0\)
- \(c_f(B,A)=c(B,A)-f(B,A)=0+3=3\)
- \(c_f(B,T)=c(B,T)-f(B,T)=9-3=6\)
- \(c_f(T,B)=c(T,B)-f(T,B)=0+3=3\)
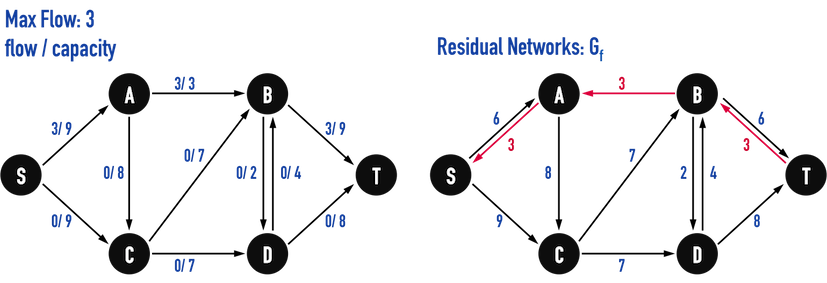
圖五(c)。
- 在Gf上,以
BFS()找到能夠從vertex(S)走到vertex(T),且「egde數最少」的路徑:\(Path:S-C-D-T\),見圖五(d)。
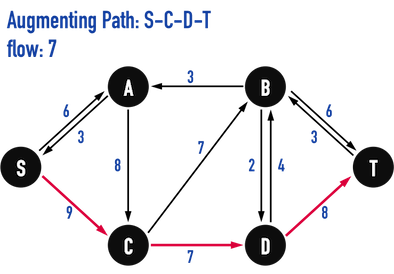
圖五(d)。
-
觀察\(Path:S-A-B-T\)上之edge,發現edge(C,D)具有「最小residual capacity」,\(c_f(C,D)=7\),便更新「總flow新增\(7\)」。
-
Gf上,更新edge之residual capacity,見圖五(e):
- \(c_f(S,C)=c(S,C)-f(S,C)=9-7=2\)
- \(c_f(C,S)=c(C,S)-f(C,S)=0+7=7\)
- \(c_f(C,D)=c(C,D)-f(C,D)=7-7=0\)
- \(c_f(D,C)=c(D,C)-f(D,C)=0+7=7\)
- \(c_f(D,T)=c(D,T)-f(D,T)=8-7=1\)
- \(c_f(T,D)=c(T,D)-f(T,D)=0+7=7\)
圖五(e)。
接著繼續重複上述步驟:「更新Residual Networks,尋找Augmenting Paths」,見圖五(f)-(l)。
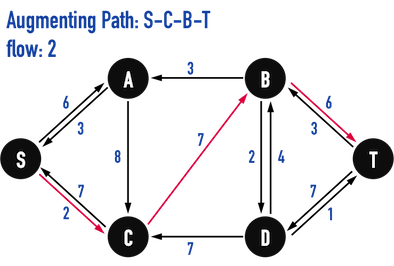
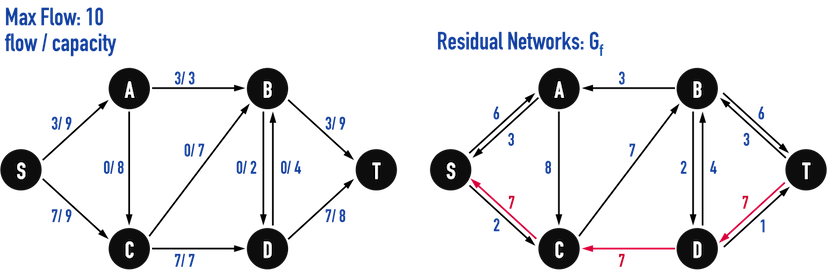
圖五(f):找到\(Path:S-C-B-T\)。
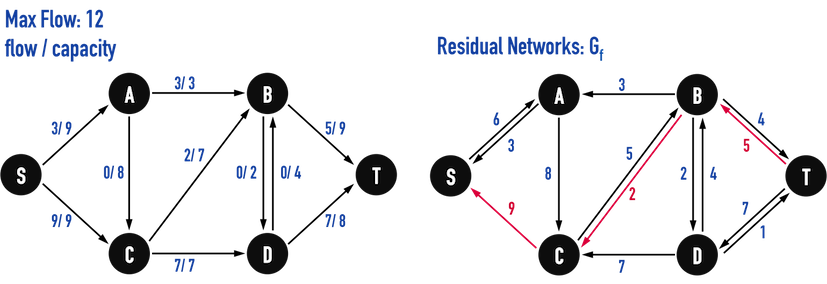
圖五(g):更新Residual Networks。
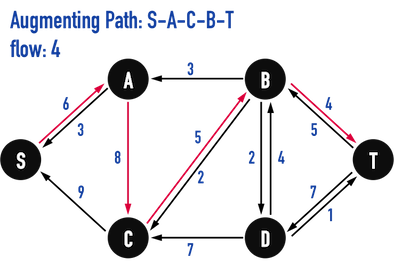
圖五(h):找到\(Path:S-A-C-B-T\)。
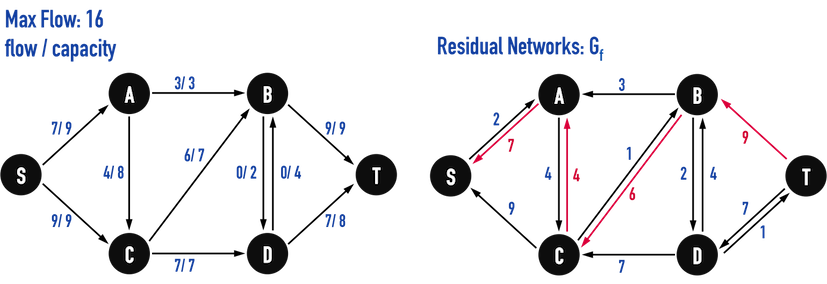
圖五(i):更新Residual Networks。
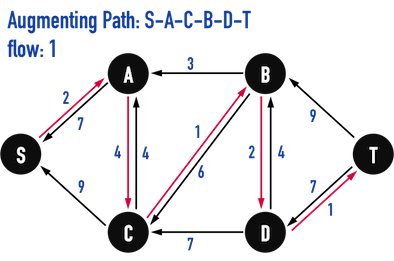
圖五(j):找到\(Path:S-A-C-B-D-T\)。
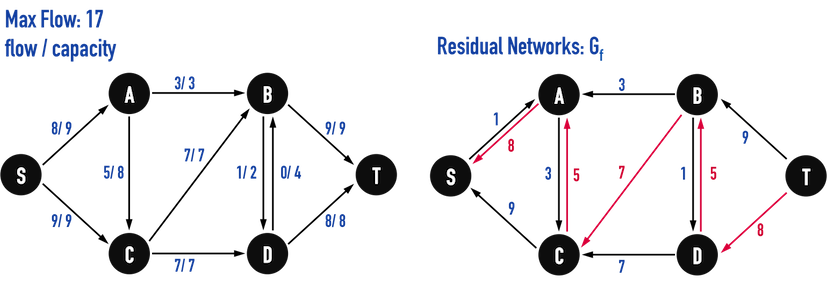
圖五(k):更新Residual Networks。
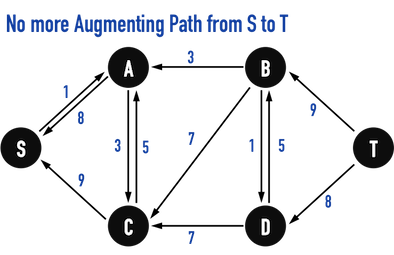
圖五(l):找到Maximum Flow。
當執行到圖五(l),在Residual Networks上再也找不到任何一條Augmenting Paths,便完成演算法。
Maximum Flow為\(17\)。
程式碼
程式碼包含幾個部分:
class Graph_FlowNetWorks:
- 使用
AdjMatrix建立Graph,並利用AdjMatrix[X][Y]儲存edge(X,Y)的weight。 BFSfindExistingPath():利用Breadth-First Search尋找「從source走到termination」的路徑,而且是edge數最少的路徑。- 關於Breadth-First Search,請參考Graph: Breadth-First Search(BFS,廣度優先搜尋)。
FordFulkerson():進行Ford-Fulkerson Algorithm的主要函式,內容如前一小節所述。MinCapacity():用來找到從BFSfindExistingPath()找到的路徑上,最小的residual capacity。
以及main():建立如圖二(a)之AdjMatrix,並進行FordFulkerson()。
// C++ code
#include <iostream>
#include <vector>
#include <queue>
class Graph_FlowNetWorks{
private:
int num_vertex;
std::vector<std::vector<int>> AdjMatrix;
public:
Graph_FlowNetWorks():num_vertex(0){};
Graph_FlowNetWorks(int n);
void AddEdge(int from, int to, int capacity);
void FordFulkerson(int source, int termination);
bool BFSfindExistingPath(std::vector<std::vector<int>> graphResidual,
int *predecessor, int source, int termination);
int MinCapacity(std::vector<std::vector<int>> graphResidual,
int *predecessor, int termination);
};
Graph_FlowNetWorks::Graph_FlowNetWorks(int n):num_vertex(n){
// constructor
AdjMatrix.resize(num_vertex);
for (int i = 0; i < num_vertex; i++)
AdjMatrix[i].resize(num_vertex);
}
bool Graph_FlowNetWorks::BFSfindExistingPath(std::vector<std::vector<int>> graph,
int *predecessor, int s, int t){
int visited[num_vertex];
for (int i = 0; i < num_vertex; i++){
visited[i] = 0; // 0 表示還沒有被找到
predecessor[i] = -1;
}
std::queue<int> queue;
// BFS 從 s 開始, 也可以規定s一律訂成vertex(0)
queue.push(s);
visited[s] = 1;
while (!queue.empty()) {
int exploring = queue.front();
for (int j = 0; j < num_vertex; j++) {
if (graph[exploring][j]!=0 && visited[j]==0) {
queue.push(j);
visited[j] = 1;
predecessor[j] = exploring;
}
}
queue.pop();
}
return (visited[t] == 1); // 若t有被visited, 表示有path從s到t
// 也可以用 if (predecessor[t] != -1) 判斷
}
int Graph_FlowNetWorks::MinCapacity(std::vector<std::vector<int>> graph,
int *predecessor, int t){
int min = 100; // 確保min會更新, 假設graph上的capacity都小於100
// 用predecessor[idx] 和 idx 表示一條edge
// 找到在從s到t的path上, capacity最小的值, 存入min
for (int idx = t; predecessor[idx] != -1; idx = predecessor[idx]){
if (graph[predecessor[idx]][idx]!=0 && graph[predecessor[idx]][idx] < min) {
min = graph[predecessor[idx]][idx];
}
}
return min;
}
void Graph_FlowNetWorks::FordFulkerson(int source, int termination){
// residual networks的初始狀態等於AdjMatrix, 見圖五(a)
std::vector<std::vector<int>> graphResidual(AdjMatrix);
int maxflow = 0;
int predecessor[num_vertex];
// BFS finds augmenting path,
while (BFSfindExistingPath(graphResidual, predecessor, source, termination)) {
int mincapacity = MinCapacity(graphResidual, predecessor, termination);
maxflow = maxflow + mincapacity;
for (int Y = termination; Y != source; Y = predecessor[Y]){
// 更新 residual graph
int X = predecessor[Y];
graphResidual[X][Y] -= mincapacity;
graphResidual[Y][X] += mincapacity;
}
}
std::cout << "Possible Maximum Flow: " << maxflow << std::endl;
}
void Graph_FlowNetWorks::AddEdge(int from, int to, int capacity){
AdjMatrix[from][to] = capacity;
}
int main(){
Graph_FlowNetWorks g11(6);
g11.AddEdge(0, 1, 9);g11.AddEdge(0, 3, 9);
g11.AddEdge(1, 2, 3);g11.AddEdge(1, 3, 8);
g11.AddEdge(2, 4, 2);g11.AddEdge(2, 5, 9);
g11.AddEdge(3, 2, 7);g11.AddEdge(3, 4, 7);
g11.AddEdge(4, 2, 4);g11.AddEdge(4, 5, 8);
g11.FordFulkerson(0, 5); // 指定source為vertex(0), termination為vertex(5)
return 0;
}
output:
Possible Maximum Flow: 17
結果與圖五(k)相同。
利用BFS的優點
若在Residual Networks尋找Augmenting Paths的方法中,
- 沒有用上BFS,稱為Ford-Fulkerson Algorithm,時間複雜度\(O(E|f|)\)。
- 其中,\(E\)為Graph上的edge數;
- \(|f|\)為「最大流量」。
- 有用上BFS,稱為Edmonds-Karp Algorithm,時間複雜度\(O(VE^2)\)。
顯然,使用BFS的優勢在於時間複雜度。
嚴謹證明請參考David Mix Barrington:The Edmonds-Karp Heuristic。
以下僅以一個簡單的例子,奉勸讀者使用BFS沒有害處。
以圖六(a)為例,若使用BFS,Maximum Flow只需要「找兩次」Augmenting Paths,\(Path:S-A-T\)以及\(Path:S-C-T\)。
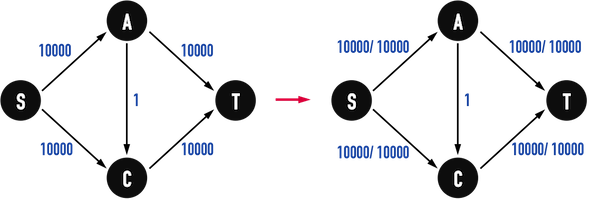
圖六(a)。
但如果使用DFS()或其他方法,很有可能找到\(Path:S-A-C-T\),因為edge(A,C)的capacity只有\(1\),\(c(A,C)=1\),便限制了每單位時間的流量,見圖六(b)。
若不幸,在下一次挑選Augmenting Paths時,選到\(Path:S-C-A-T\),又只能流入\(1\)單位的flow。
若每次都挑選到capacity只有\(1\)的edge,那麼,總共尋找Augmenting Paths的次數恰等於「總flow」的量,以圖六(b)為例,需要找\(20000\)次Augmenting Paths,不算有效率的方法。
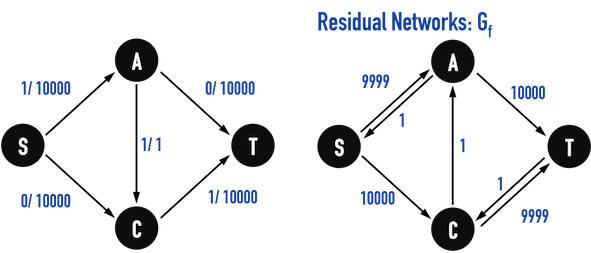
圖六(b)。
以上便是Ford-Fulkerson Algorithm(說是Edmonds-Karp Algorithm也可以)的介紹。
關於Maximum Flow的應用,請參考Wikipedia:Maximum flow problem。
參考資料:
- Introduction to Algorithms, Ch26
- Fundamentals of Data Structures in C++, Ch6
- LILD:Ford Fulkerson algorithm for Max Flow
- GeeksforGeeks:Ford-Fulkerson Algorithm for Maximum Flow Problem
- Graph: Breadth-First Search(BFS,廣度優先搜尋)
- David Mix Barrington:The Edmonds-Karp Heuristic
- Wikipedia:Maximum flow problem
- Mr. Opengate:Algorithm - Ch5 網路流 與 最大流最小割定理 Network Flow and Maximum Flow Minimum Cut Theorem
- CK6125姜俊宇:網路流(Network Flow)
Flow Networks系列文章
Flow Networks:Maximum Flow & Ford-Fulkerson Algorithm
回到目錄: